汽車自動駕駛的關鍵:視覺運算
前幾天 Google 在官方部落格提出一篇關於汽車自動駕駛的相關文章,目前 Google 已經開始在城市街道測試自動駕駛,不同於先前 Google 在較偏遠的郊區測試自動駕駛,城市裡的交通變數遠遠複雜過美國的郊區,包括行人、機踏車、快速變換車道的其他車輛等,都會讓自動駕駛變得更為複雜。
資訊來源: Google , NVIDIA Blog
雖然在概念上,也許在高速行動網路與雲端運算中心的輔助下,可透過將車輛感測器蒐集的資訊以雲端的方式進行處理再回傳給車輛,不過依照現實的狀況,馬路的變化瞬息萬變,行動網路的訊號穩定、透過雲運算的資訊傳遞時間差,都可能造成意外的發生,故最終的方式最好還是回歸車上有一套獨立的視覺運算系統。
NVIDIA 也針對 Google 的這篇部落格內容發表他們的觀點,表示目前在自動駕駛的關鍵應該就在於視覺運算。 NVIDIA 曾在今年的 GTC 展出與 AUDI 合作的自動駕駛,憑藉著具備運算級架構的 Mobile Kepler GPU 的 NVIDIA Tegra K1 應用處理器,以機器視覺的方式追蹤一路上的物體並且進行判斷。
另外當時也訪問與 NVIDIA 合作推出 Andia 車載參考平台的富士康安泰,同樣也是基於 Tegra K1 平台,透過與台灣研究機構合作的視覺演算法,提供一套交通號誌與倒車輔助的系統。
為何視覺運算在自動駕駛相當重要?因為目前的自動駕駛導航的路線規劃,雖然可透過 GPS 定位輔助,但對於車輛而言,它只是決定了基本的行進路線,並不能安全的把車子開到預定的目標,就像一般開車時即便有導航服務,駕駛者仍需注視路上的情況並進行判斷,才能安全的把車子開到目的地。
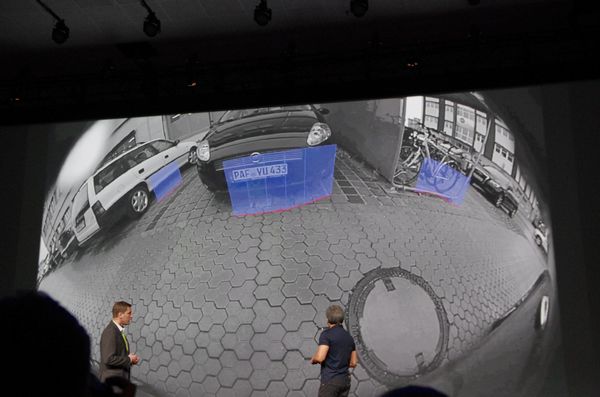
視覺運算在自動駕駛扮演的角色,就是取代駕駛人的功能,所以這套系統需要透過包括攝影機與測距感測器不斷地蒐集資訊,透過系統判斷與其它道路上的車輛與物體的距離、交通號誌的指示,才能精準的操作車子到達目的地。
把一路上擷取的影像結合測距系統進行分析,能夠判讀與其它物體正確的相對位置、對方是否進行超車、是否維持在正確的道路上與包括分辨紅綠燈、速限、安全警示等資訊,能否把這些資訊的判讀做到跟人腦的反應一樣快、甚至超越人腦,就是要靠強大的運算系統,而這類的圖像分析與機器視覺,正是結合 CPU 與 GPU 的平行運算的強項。
另外當時富士康安泰還透過 Tegra K 1 的演算能力,提供在滂沱大雨的環境下,把車外攝影機的影像訊息進行再演算,使系統能在惡劣的環境下獲取正確的道路影像,這甚至是人眼所無法具備的能力。雖然從目前的使用情況,自動駕駛系統還有一段路需要克服,但隨著嵌入式視覺運算平台與演算邏輯越來越進步,自動駕駛應該指日可待。
延伸閱讀